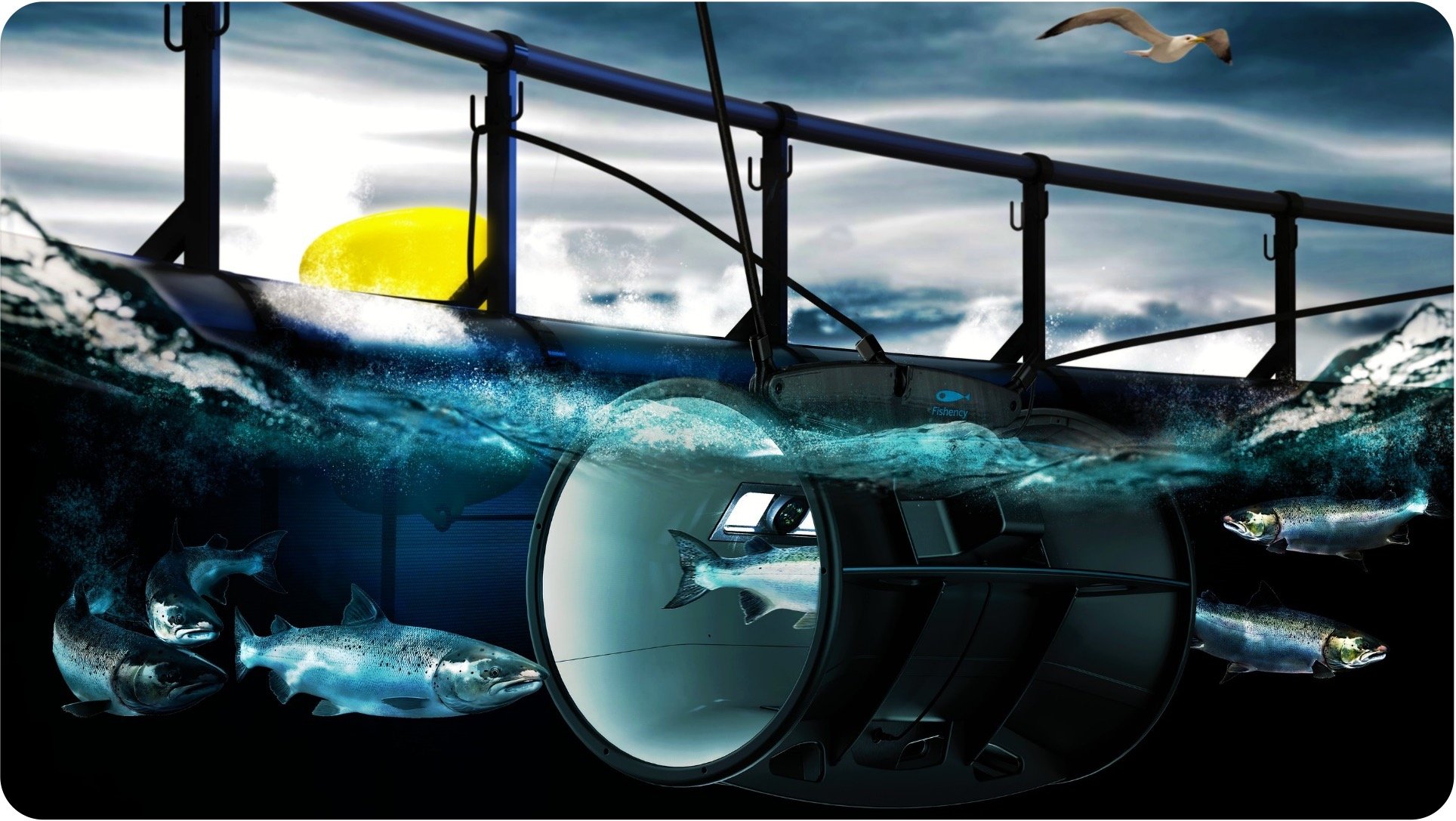
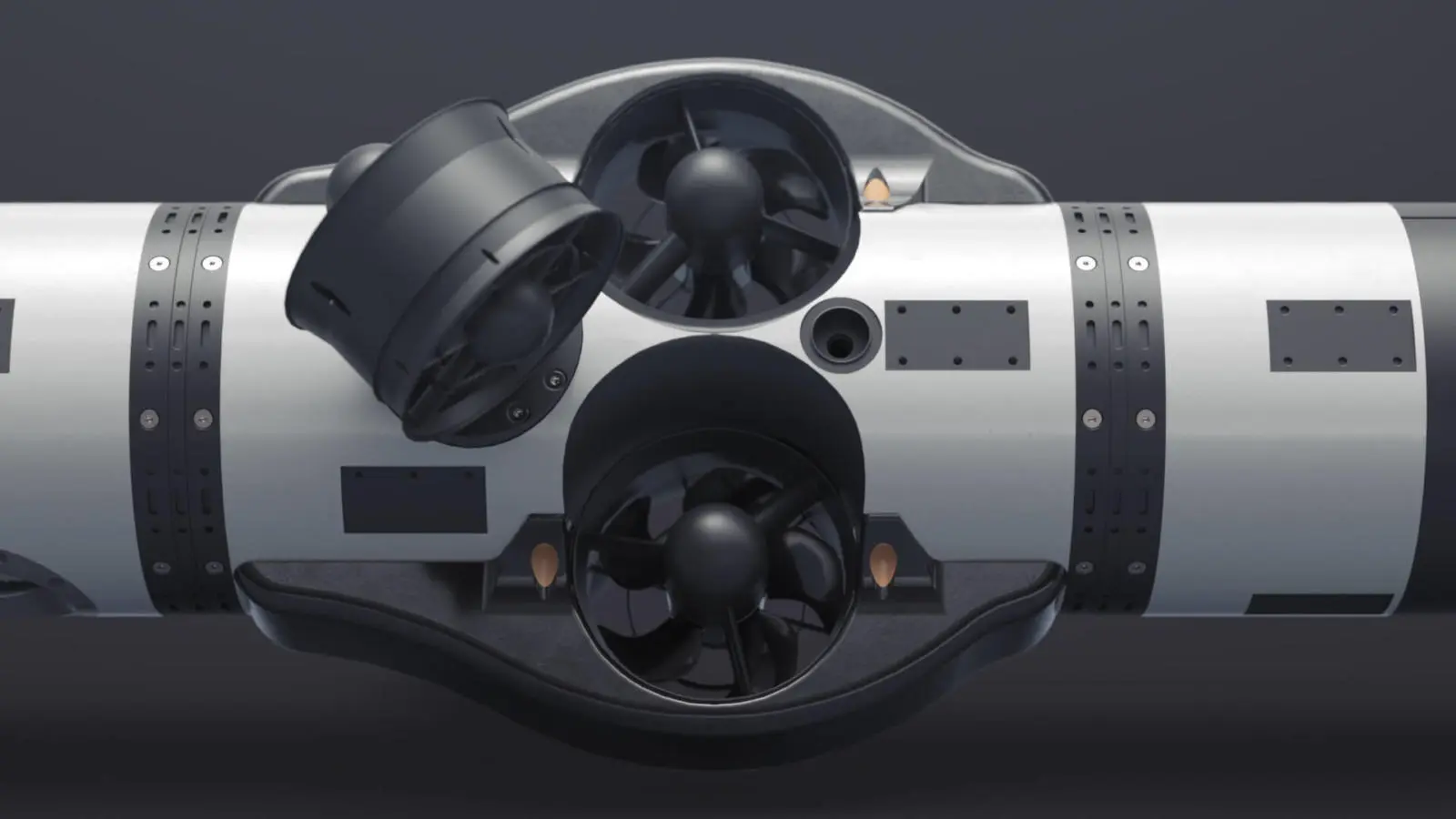
Eelumes nye inspeksjons- og intervensjonsplattform representerer en disruptiv innovasjon med henhold til arbeid under vann, og er et betydelig teknologisk fremskritt for hele næringen og vil kunne løse mange av dagens utfordringer billigere, raskere og mer presist.
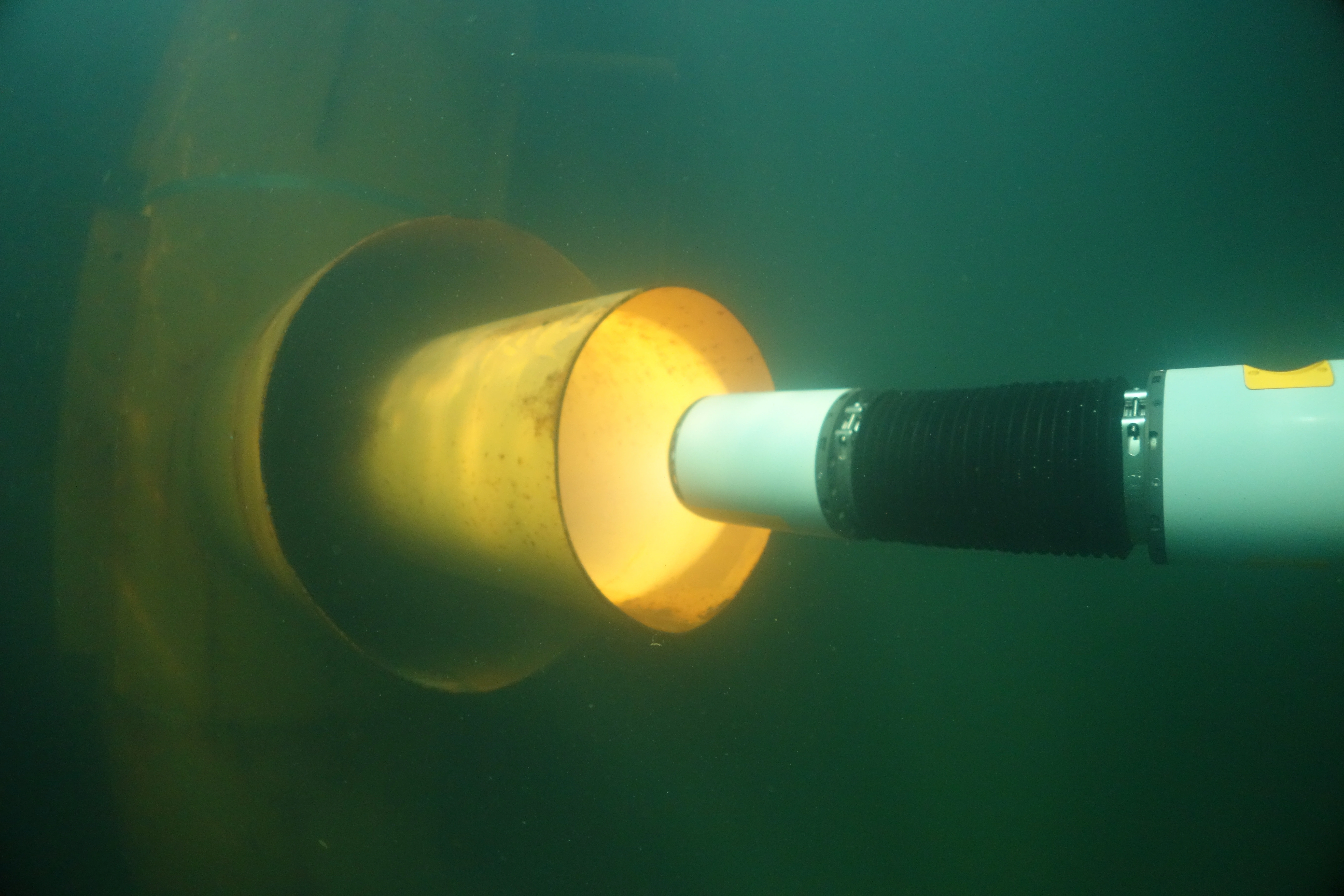
Radikal endring for inspeksjon av undervanns-installasjoner


Spinoff fra NTNU TTO

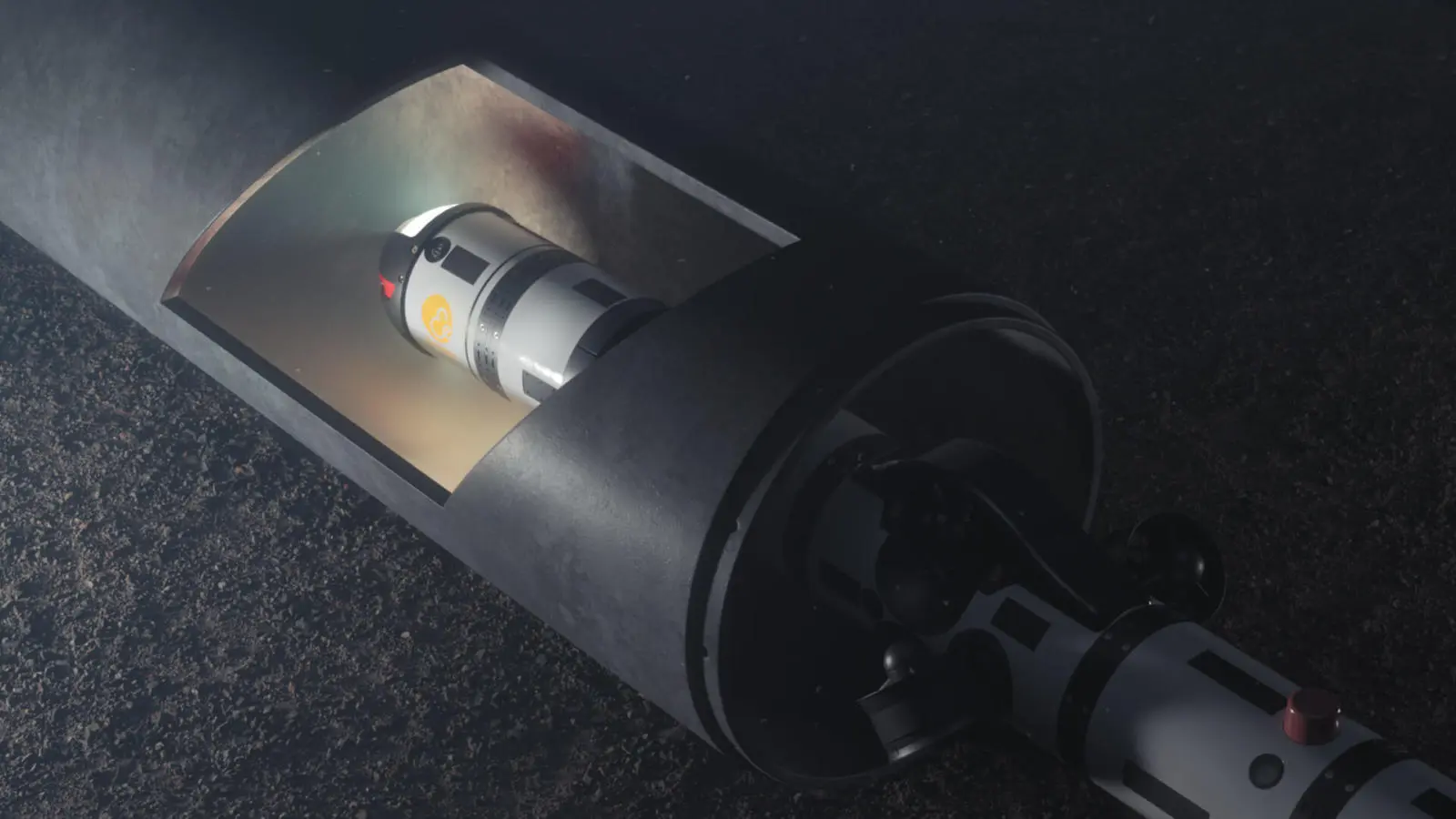
Komplekse installasjoner
Skalerbar plattform

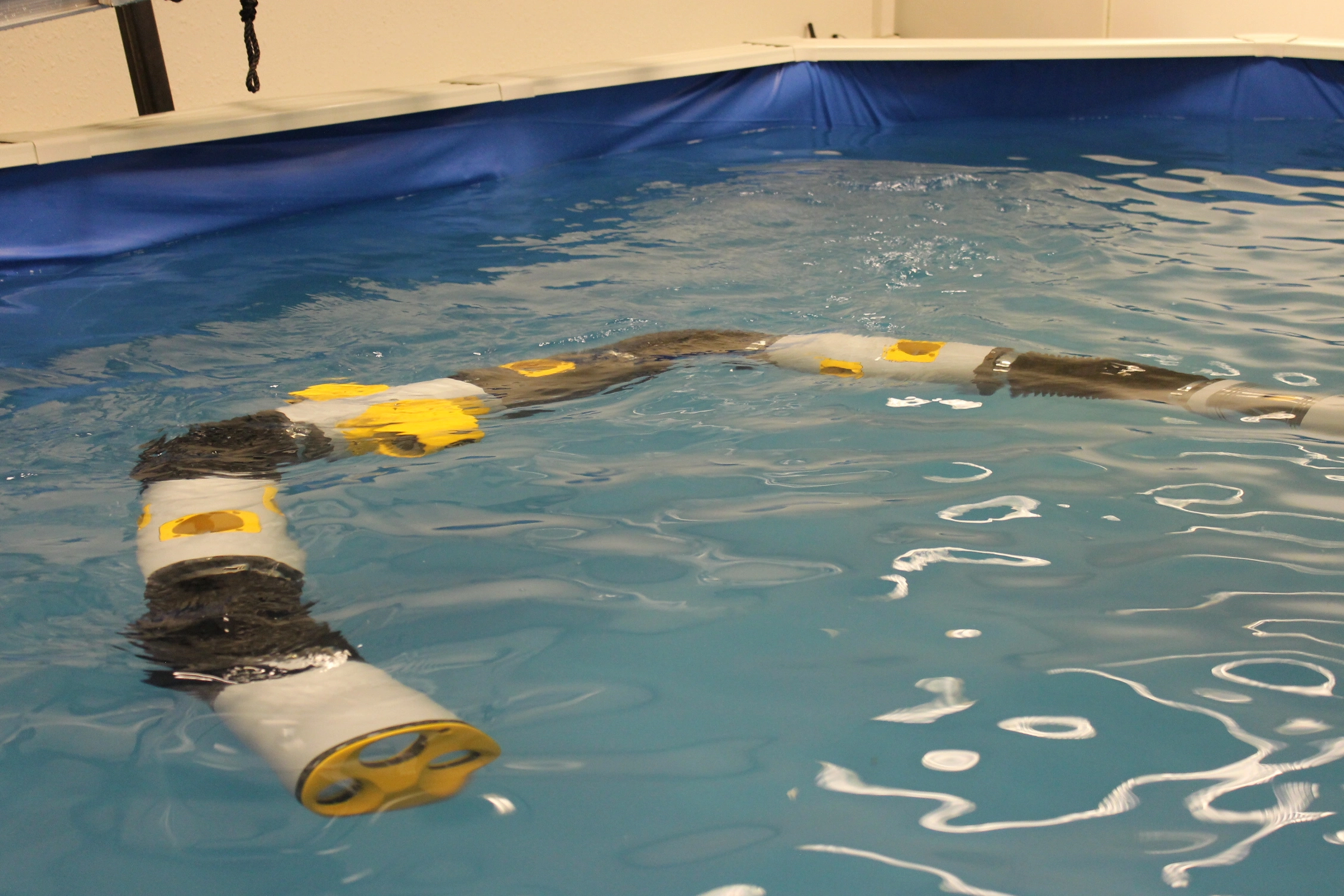
En smidig robotarm uten kropp
Fordeler

Samarbeid med Inventas

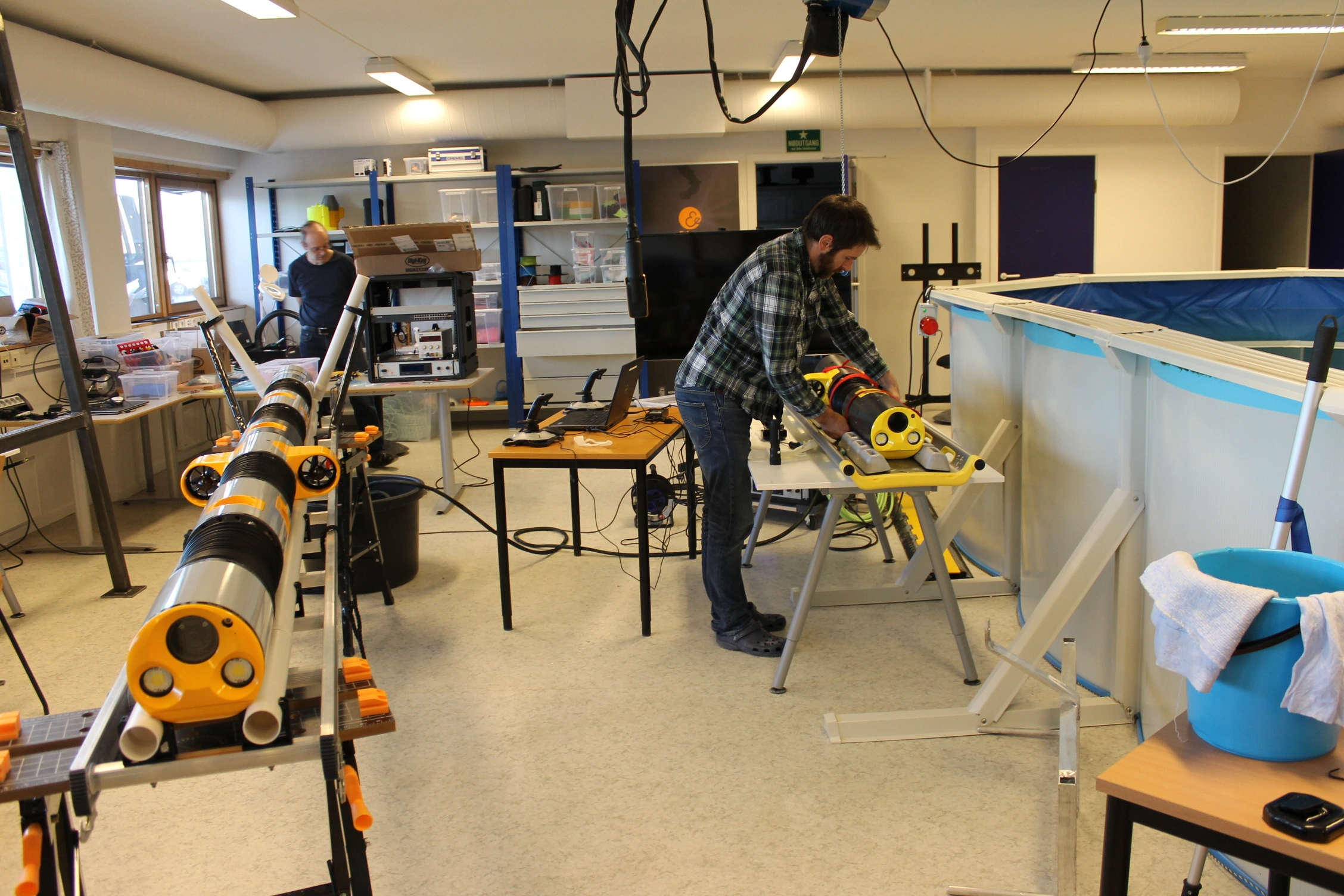
Bakgrunn for prosjektet