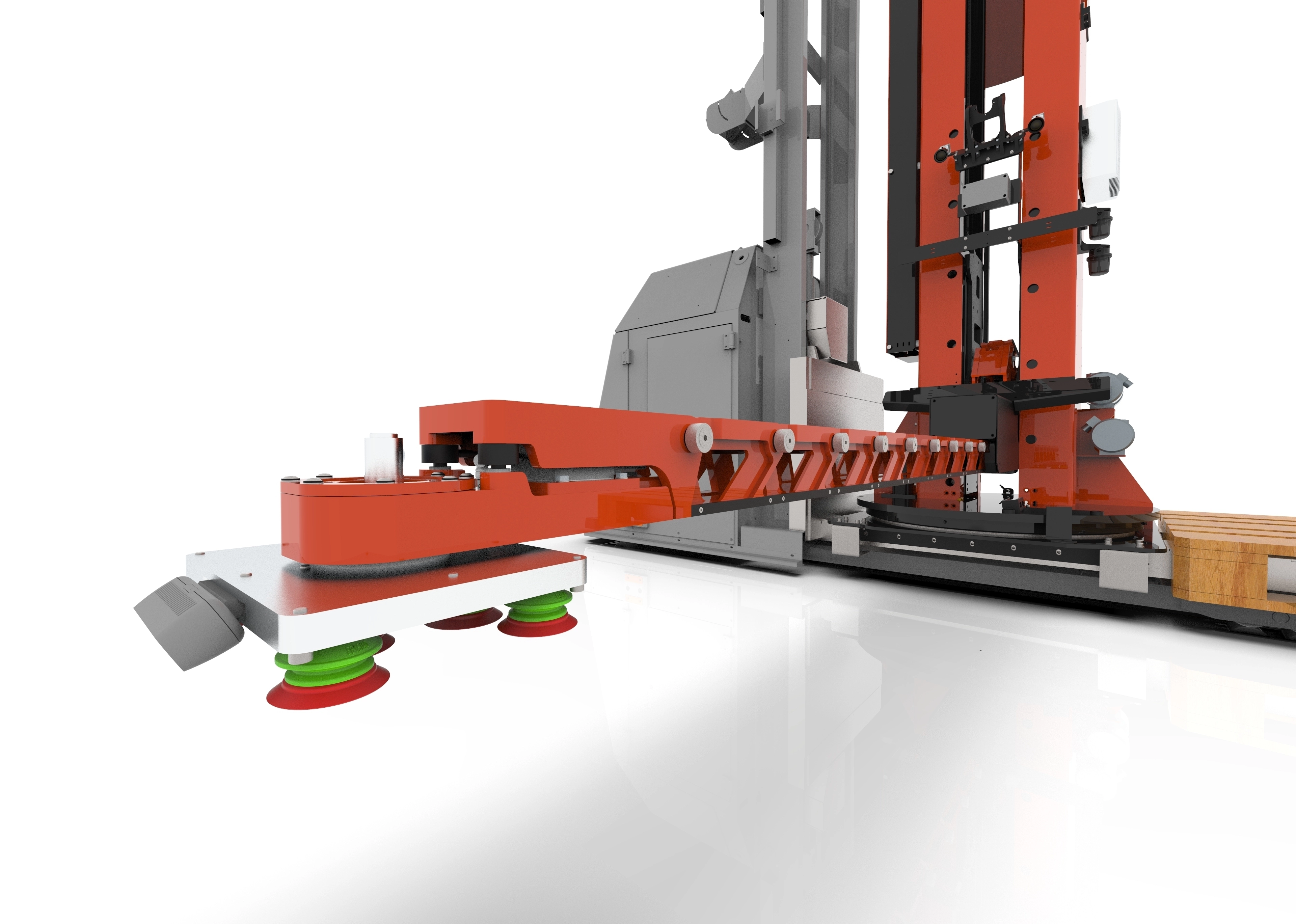
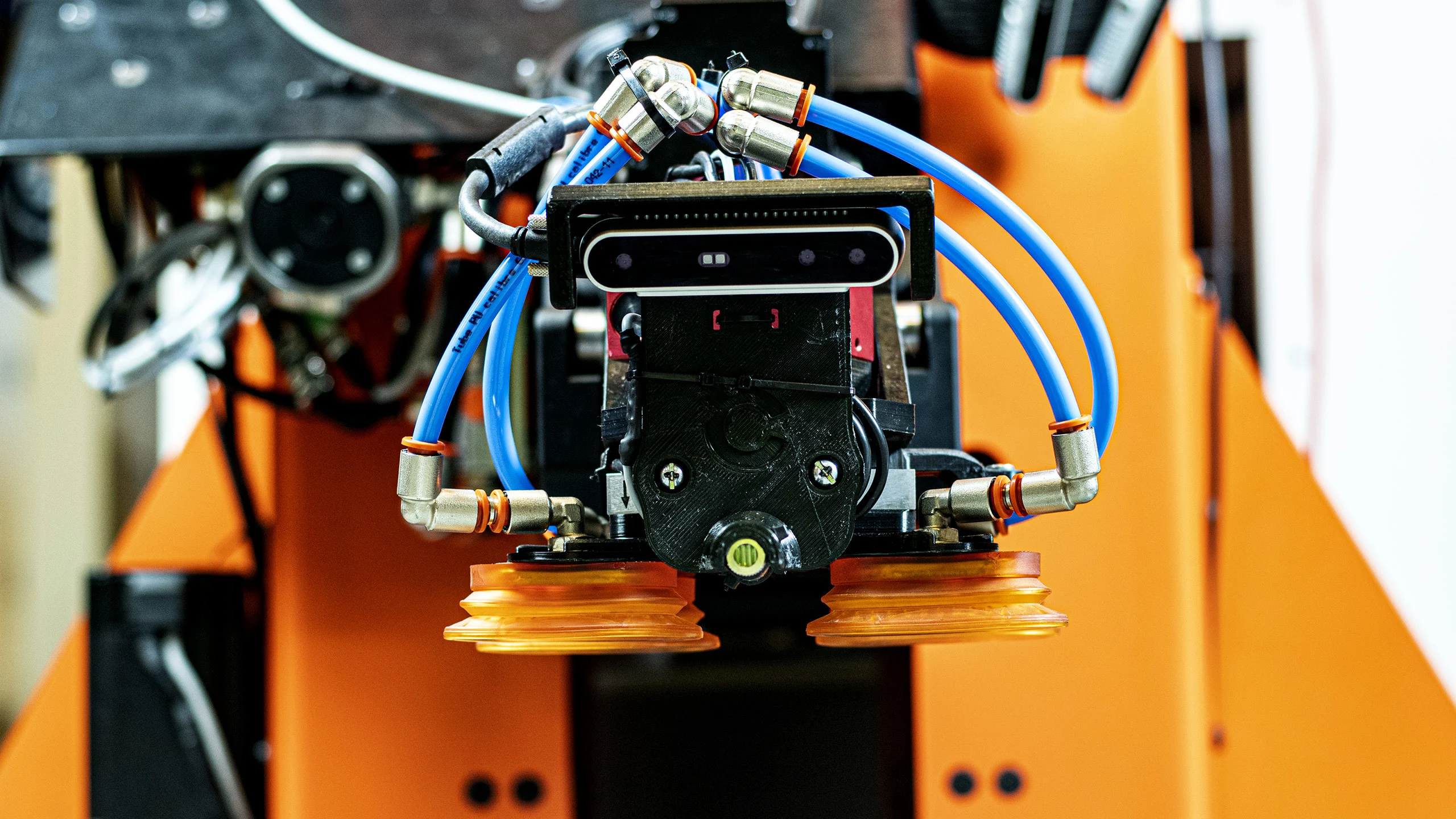
Grab er en patentert logistikkrobot med 3d-syn som plukker enkeltvarer fra pall i reol, sikkert og effektivt.
Automatiserer pakkeprosessene

Overvinner tradisjonelle barrierer


Lav byggehøyde, lang rekkevidde

Jobber sammen med mennesker

Brukerinnsikt og konkretisering av krav